李群和李代数是非常抽象的数学概念,在SLAM中我们通过他来衡量旋转平移的变化量。
1.基本概念
李群李代数主要用于SLAM算法中平移以及旋转来的求导。由于旋转矩阵为矩阵形式,不能用$R+\Delta R$表示变化量。
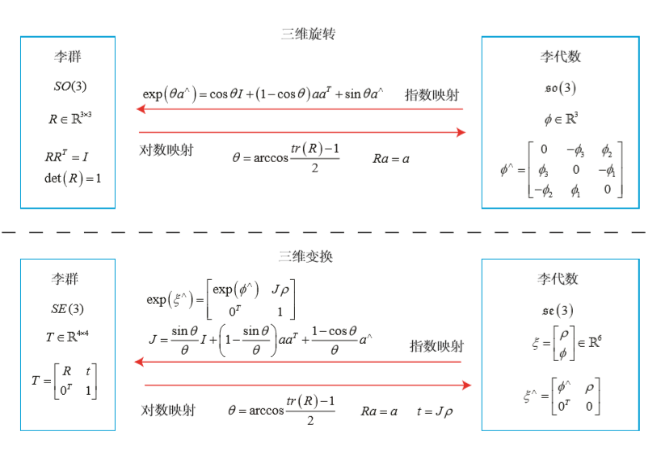
三维矩阵旋转构成了特殊正交群$SO(3)$,变换矩阵则构成了特殊欧式群$SE(3)$
群(Group)是一种集合加上一种运算的代数结构。李群则是光滑的群(整数群就不光滑不连续)。李代数描述了李群的局部性质(变化率,相当于求导数)。
对于任意旋转矩阵$R$,由于它是正交矩阵,所以满足$RR^T=I$,如果$R$连续随时间变化,则我们用$R(t)$表示:
对其求导可得:
如果矩阵A满足$A^T=-A$,则称之为反对称矩阵。它的展开形式一定是:
所以我们可以用向量$[a_1,a_2,a_3]\land$表示
由于$\dot{R}(t)R(t)^T$是一个反对称矩阵,我们可以找到一个三维向量 与之对应。于是有:
等式左右两边乘以$R(t)$,由于$R$是正交矩阵,所以有:
可以看到,每对旋转矩阵求一次导数,只需左乘一个 $\phi(t)\land$ 矩阵即可。为方便讨论,我们设 $t_0=0$,并设此时旋转矩阵为 $R(0)=I$,按照导数定义,可以把 $R(t)$ 在 0 附近进行 一阶泰勒展开:
同时在 $t_0$ 附近,设$\phi$ 保持为常数$\phi(t_0)=\phi_0$(保证$\phi{}$在 $t_0 $附近保持不变)则可以推导得出:
解微分方程可以得到:
由此可知给定某时刻的 $R$,我们就能求得一个 $\phi$,它描述了 $R$ 在局部的导数关系,它是一个李代数。
2. 映射关系
以下关系专门针对三维矩阵旋转构成了特殊正交群$SO(3)$,变换矩阵构成的特殊欧式群$SE(3)$,$\mathfrak{so}(3)$表示特殊正交群的李代数,此时旋转通过对数映射用$\phi$表示,$\mathfrak{se}(3)$表示特殊欧式群的李代数,变换用$\xi$
2.1 SO(3)上的映射
$\exp(ϕ∧)$ 是如何计算的?它是一个矩阵的指数,在李群和李代数中,称为指数映射(Exponential Map)
任意矩阵的指数映射可以写成一个泰勒展开:
替换A得到:
对于反对称矩阵有两条特殊性质:
展开可以得到:
最后就得到了类似罗德里格斯公式的式子:
罗德里格斯公式如下:
因此我们可以知道,$\mathfrak{so}(3)$ 实际上就是由所谓的旋转向量组成的空间,而指数映射即罗德里格斯公式
反之也可以定义对数映射:
2.2 SE(3)上的指数映射
相较于之前,我们把旋转矩阵$R$替换为变换矩阵$T$:
解微分方程可以得到:
仿照前面的指数展开可以得到:
右上角的 $J$ 可整理为:
3. 李代数求导
3.1 BCH公式与近似形式
在$SO3$中完成两个矩阵乘法时,在$\mathfrak{so}(3)$是否对应着加法?如果成立的话,相当于:
换言之,我们需要研究下述公式是否成立:
然而这个式子在矩阵时并不成立,他真实的成立条件由BCH公式给出:
其中[ ]为李括号。
一般来说李括号$\left[ {A,B} \right] = AB - BA$,若满足$\mathbf{\phi}$为反对称矩阵,则李括号的结果为:
取近似项可得:
在 $\phi_1$ 较小时,使用第一个式;在在 $\phi_2$ 较小时,使用第二个式(换句话说依据是左乘一个微小位移还是右乘)。
以第一个近似为例。该式告诉我们,当对一个旋转矩阵 $R_2$李代数为 $\phi_2$左乘一个微小旋转矩阵 $R_1$李代数为 $\phi_1$时,可以近似地看作,在原有的李代数 $\phi_2$ 上,加上了一 项 ${J_l}{\left( {\phi _2} \right)^{ - 1}}{\phi _1}$
这里的 $J_l$ 和 $J_r$ 也称为左/右雅可比——从而李代数就分成了左右两种模型(因此,李代数程序库会声明它使用的是左乘模型还是右乘模型)
这两个雅克比矩阵可以表示为如下形式,他和旋转向量$\theta a$的关系
雅克比矩阵表示的是m个n元函数的一阶导数组成的矩阵
3.2 李代数求导模型
假设我们对一个空间点 $p$ 进行了旋转,得到了 $R_p$。现 在,要计算旋转之后点的坐标相对于旋转的导数,我们记为:
按照李代数的写法:
按照3.1所推导的结论:
第二行的近似为 BCH 线性近似,第三行为泰勒展开舍去高阶项后近似,第四行至第 五行将反对称符号看作叉积,交换之后变号。于是,我们推导了旋转后的点相对于李代数的导数:
得到的结果中包含雅克比矩阵,我们希望进一步简化,因此可以采用扰动模型。
3.3 扰动模型
上一种求导方式比较复杂,下面介绍另一种另一种求导方式,是对 $R$ 进行一次扰动 $∆R$。这个扰动可以乘在左边也可以乘在右 边,最后结果会有一点儿微小的差异。
假设我们对一个空间点 $p$ 进行了旋转,得到了 $R_p$。现 在,要计算旋转之后点的坐标相对于旋转的导数,我们记为:
这里和李代数求导模型有很大区别,李代数求导模型是老老实实按照求导定义来的,因此出现了李代数加法从而引出了雅克比矩阵,而扰动模型用乘法来近似。
近似后可以得到:
同理在SE3上的李代数求导结果为
其中⊙算符把一个4×4的矩阵变换成一个4×6的矩阵,计算方式如下: