前一章讲的非线性优化方法其实是后端优化中的一个工具。后端需要对前端传来的传感信息进行优化,方法有卡尔曼滤波和光束法平差BA两种。
1. 经典的后端优化方法
1.1 状态估计的概率解释
视觉里程计只有短暂的记忆,在后端优化中,我们通常考虑一个更长时间内(或所有时间内)的状态估计问题,而且不仅使用过去的信息更新自己的状态,也会用未来的信息来更新自己。
运动方程和观测方程组成了SLAM系统,每个方程都受噪声影响,所以要把这里的位姿 $x$ 和路标 $y$ 看成服从某种概率分布的随机变量,而不是单独的一个数。因此整个问题变成了:当我拥有某些运动数据 $u$ 和观测数据 $z$ 时,如何来确定状态量 $x,y$ 的分布?
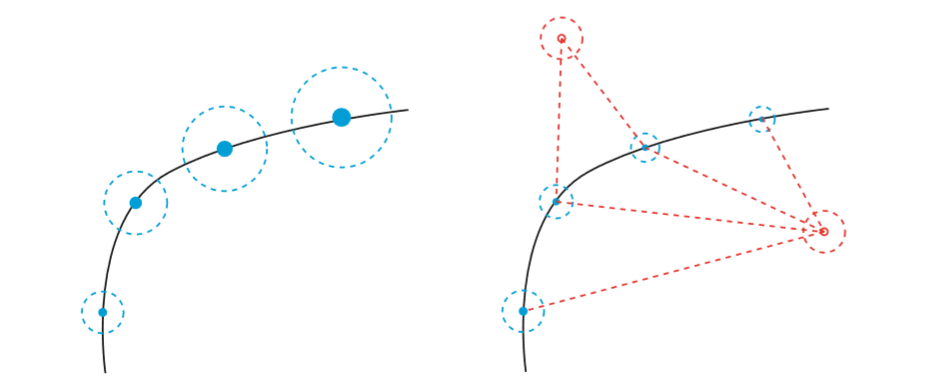
当没有观测数据,只有运动方程时,如左图所示,噪声导致的误差会逐渐累积,不确定性越来越大。如果我们可以观测路标点,误差会得到修正,不确定性就会减小。
下面以定量的角度思考。令$x_k$为$k$时刻的所有未知量,它包含了当前时刻的相机位姿和$m$个路标点。
>同时,把$k$时刻的所有观测记为$z_k$,$u_k$还是表示传感器输入,整个方程可以写得比较简单。
现在考虑第$k$时刻的情况。我们希望用过去0到$k$的数据,来估计现在的状态分布:
下标 $0:k$表示从 0 时刻到 k 时刻的所有数据。请注意 $z_k$ 来表达所有在k时刻的观测数据,注意它可能不止一个,只是这种记法更加方便。这个式子表达了:已知初始位姿、之前所有的观测数据和传感器数据,通过这些条件来估计$k$时刻的位姿。
按照贝叶斯法则,展开可得:
左边为后验概率,右边第一项为似然概率(已知数据求模型参数),第二项为先验概率。似然概率可以由观测方程计算得到,至于先验概率,我们知道当前状态$x(k)$是根据过去所有状态估计得到,所以他至少会受到$x(k-1)$的影响,于是在此处按照条件概率展开:
如果我们考虑更久之前的状态,也可以继续对此式进行展开,但现在我们只关心 $k$ 时刻和 $k−1$ 时刻的情况。
后续的处理有两种方式:其一是假设马尔可夫性,即k 时刻状态只与k−1时刻状态有关,而与再之前的无关;其二依然考虑 k 时刻状态与之前所有状态的关系。前一种得到的方法是扩展卡尔曼滤波(EKF),第二种得到非线性优化。
1.2 线性系统和KF
按照马尔科夫性,状态只与上一个时刻有关,因此公式可以进行简化。
由于$k$时刻的状态与$k-1$之前无关,所以可以简化为只与$x_{k-1}$和$u_k$相关的形式,所以第一项可以简化为:
第二项由于输入量$u_k$与$k-1$无关,所以可以将其去掉:
可以看到这就是$k-1$时刻的状态分布(参照贝叶斯法则展开前$P(x{k}|x{0},u{1:k},z{1:k})$)。我们实际在做的是“如何把 k−1 时刻的状态分布推导至 k 时刻”这样一件事。
首先从简单的线性高斯系统开始。
第一个公式描述状态量$xk$,$A_k$是状态转移矩阵,负责描述$x{k-1}$时刻到$x_k$的状态,$u_k$是控制矩阵,是k-1到k状态改变的原因,$w_k$是噪声。
第二个公式描述观测量$z_k$,$C_k$时观测矩阵,$v_k$是噪声。并假设所有的状态和噪声均满足高斯分布。记这里的噪声服从零均值高斯分布:
假设我们已知$x{k-1}$状态分布的后验状态估计$\overset{\wedge }{x}{k-1}$和协方差$\overset {\wedge }x{k-1}$根据输入数据和观测数据,确定$x_k$的后验分布。$\overset{\wedge }x{k}$表示后验,$\overset{- }x_{k}$表示先验。
高斯分布运算性质:
若$y=\textbf{A}x$,则y满足:
所以有:
因此我们得到了两个公式:状态预测公式,协方差预测公式
这里$\overset{-}{x}{k}$表示先验分布,也就是不准确的,$\overset{\wedge }{x}{k}$表示的是后验分布,是经过修正的。
得到的这两个结果都是预测结果,他们需要通过观测方程来进行修正。由于计算过程太复杂,直接给出结果:
计算出$\overset{\wedge }{P}_{k}$是为了留给下一次迭代使用。
这里的$K$表示卡尔曼系数,它具有两个作用:
- 决定相信预测模型$\overset{- }{x}_{k}$更多一些还是观测模型更多一些
- 将残差$(z{k}-C{k}\overset{- }{x}_{k})$的表现形式由观测域转化到状态域
卡尔曼系数的计算公式是:
所以卡尔曼滤波可以由五个公式概括:
前两个是预测公式,后两个是更新公式(将预测的先验值修正)。
1.3 非线性系统和EKF
卡尔曼滤波是针对线性方程,当系统非线性时需要通过一些操作来近似,这就是扩展卡尔曼滤波(Extended Kalman Filter, EKF)
EKF的做法主要有两点:
其一是在工作点$\overset{\wedge }{x}{k-1},\overset{-}{x}{k}$附近进行泰勒展开,将系统线性化:
这里的偏导数都在工作点附近取值,最后变成了一个线性系统。
其二是在线性系统近似下,把噪声项和状态都当成了高斯分布。经过这两项近似以后得到的结果和普通卡尔曼滤波就一样了:
1.4 EKF的问题讨论
EKF主要有三个问题:
滤波器方法假设了马尔可夫性,也就是 k 时刻的状态只与 k−1 时刻相关,而与 k −1 之前的状态和观测都无关。这比较像视觉里程计的原理,但是如果当前帧确实和以前的数据有关(例如回环检测),滤波器就无法应对。
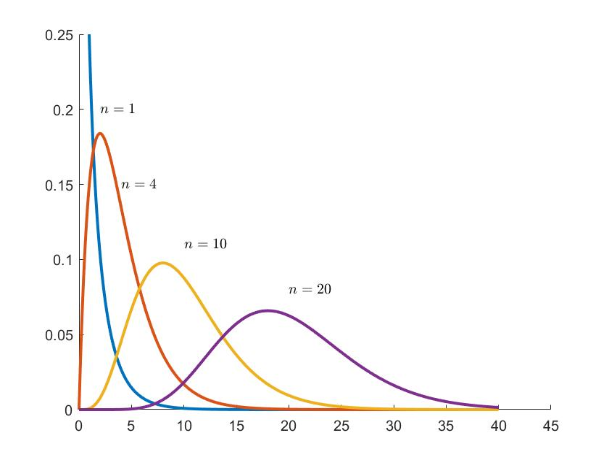
由非线性转化到线性时我们安排了两个假设:展开点取一次项,把噪声项和状态都当成了高斯分布。系统本身线性化过程中,丢掉了高阶项。即使是高斯分布,经过一个非线性变换后也不是高斯分布。举个例子,假设一个$x\sim N(0,1)$,那么$y=x^2$服从的是卡方分布,当卡方分布n较大时,比较接近高斯分布,这样我们就可以很好近似。但是当n比较小近似的结果就很差。
从程序实现上来说,EKF 需要存储状态量的均值和方差,并对它们进行维护和更新。 如果把路标也放进状态的话,由于视觉 SLAM 中路标数量很大,这个存储量是相当可观的,且与状态量呈平方增长(因为要存储协方差矩阵)。因此,EKF普遍被认为不可适用于大型场景SLAM。
2. 现代优化方法:BA与图优化
见专题