ORB特征检测是由FAST角点检测和BRIEF描述子检测组合的检测手段,在ORBSLAM中有良好运用。
1. 基本概念
特征点指图像中选取比较有代表性的点,这些点在相机视角发生少量变化后会保持不变,所以我们会在各个图像中找到相同的点。
特征点由关键点(Key-point)和描述子(Descriptor)两部分组成。关键点是指该特征点在图像里的位置,有些特征点还具有朝向、大小等信息。描述子通常是一个 向量,描述了该关键点周围像素的信息。描述子是按照“外观相似的特征应该有相似的描述子”的原则设计的。
ORB (Oriented FAST and Rotated BRIEF)改进了 FAST 检测子不具有方向性的问题,并采用速度极快的二进制描述子 BRIEF,使整个图像特征提取的环节大大加速。借助尺度空间理论构建图像高斯金字塔,然后在每一层金字塔图像上检测角点,以实现尺度不变性。
ORB 特征亦由关键点和描述子两部分组成。它的关键点称为”Oriented FAST”,是 一种改进的 FAST 角点,它的描述子称为 BRIEF (Binary Robust Independent Elementary Features)。因此,提取 ORB 特征分为两个步骤:
- FAST 角点提取:找出图像中的”角点”。相较于原版的 FAST, ORB 中计算了特征点的主方向,为后续的 BRIEF 描述子增加了旋转不变特性。
- BRIEF 描述子:对前一步提取出特征点的周围图像区域进行描述。
2. Fast关键点
FAST 是一种角点,主要检测局部像素灰度变化明显的地方,以速度快著称。它的思想是:如果一个像素与它邻域的像素差别较大(过亮或过暗), 那它更可能是角点。算法步骤如下:
- 在图像中选取像素 $p$,假设它的亮度为 $I_p$。
- 设置一个阈值 $T$(比如 Ip 的 20%)
- 以像素 $p$ 为中心, 选取半径为 3 的圆上的 16 个像素点。
- 假如选取的圆上,有连续的 $N$ 个点的亮度大于 $(I_p + T)$ 或小于 $(I_p −T)$,那么像素 p 可以被认为是特征点 ($N$ 通常取 12,即为 FAST-12。其它常用的 $N$ 取值为9和11, 他们分别被称为 FAST-9,FAST-11)。

在 FAST-12 算法中,为了更高效,可以添加一项预测试操作,以快速地排除绝大多数不是角点的像素。直接检测邻域圆上的第 1,5,9,13 个像素的亮度。只有当这四个像素中有三个同时亮度大于 $(I_p + T)$ 或小于 $(I_p −T)$,当前像素才有 可能是一个角点,否则应该直接排除。
FAST算子本身是不具有方向性的,因此我们需要引入距分析来完成oriented:
图像的距为:
质心为:
连接图像的几何中心O和质心C可以得到方向向量$\vec{OC}$,方向就可以被定义为:
3. BRIEF描述子
BRIEF 是一种二进制描述子,它的描述向量由许多个 0 和 1 组成,这里的 0 和 1 编码了关键点附近两个像素(比如说 p 和 q)的大小关系:如果 p 比 q 大,则取 1,反之就取 0。如果我们取了 128 个这样的 pq,最后就得到 128 维由 0,1 组成的向量。
pq的选点在BRIEF中采取了随机选点的比较,速度很快。
算法步骤如下:
- 以特征点P为中心,取一个S×S大小的Patch邻域;
- 在这个邻域内随机取N对点(x,y),比较N对像素点的灰度值的大小,如果x的灰度大于y,则写为1,反之为0
- 重复步骤2得到N个(一般为256)二进制代码串
随机点的选择一般采用高斯分布的形式,匹配时采用汉明距离(两代码串同位不同的个数,比如010和101汉明距离为3)
原始的 BRIEF 描述子不具有旋转不变性,因此在图像发生旋转时容易丢失。原因是其采用了方形领域,当旋转时会造成覆盖的区域发生变化:

而 ORB 在 FAST 特征点提取阶段计算了关键点的方向,所以可以利用方向信息,计算了旋转之后的”Steer BRIEF”特征,使 ORB 的描述子具有较好的旋转不变性。
4. 尺度不变性
前面介绍了利用距分析获取特征方向从而实现旋转不变性,同样的我们也需要实现尺度不变性,我们在描述一个特征之前,将两张图像都变换同一个尺度上,然后再在这个统一标准上来描述这个特征。
为了实现尺度不变性,需要给特征加上尺度因子。在进行特征描述的时候,将尺度统一即可。一般采用高斯金字塔模型。
与普通的金子塔不同,我们进行分组构建:
- 先将原图像扩大一倍之后作为高斯金字塔的第1组第1层,将第1组第1层图像经高斯滤波之后作为第1组金字塔的第2层。
- 将第一次滤波的方差$\sigma$乘以比例系数得到$\sigma_2=k\sigma_1$,用它来平滑第1组第2层图像,结果图像作为第3层。
- 如此这般重复,最后得到L层图像,在同一组中,每一层图像的尺寸都是一样的,只是平滑系数不一样。它们对应的平滑系数分别为:$0,σ,kσ,k^2σ,k^3σ……k^(L-2)σ$
- 将第1组倒数第三层图像作比例因子为2的降采样(缩小一倍),得到的图像作为第2组的第1层,重复步骤2
这样反复执行,就可以得到一共O组,每组L层,共计O*L个图像,这些图像一起就构成了高斯金字塔,结构如下:
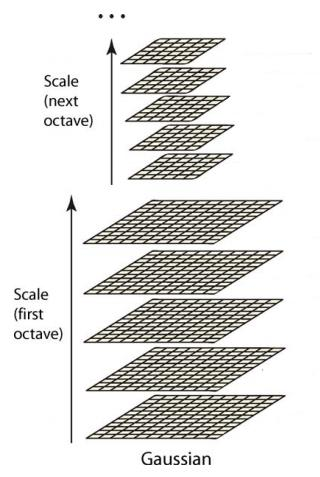
在高斯金字塔中一共生成O组L层不同尺度的图像,这两个量合起来(O,L)就构成了高斯金字塔的尺度空间,也就是说以高斯金字塔的组O作为二维坐标系的一个坐标,不同层L作为另一个坐标,则给定的一组坐标(O,L)就可以唯一确定高斯金字塔中的一幅图像。