1.概述
1.1 图的概念
Convisibility Graph
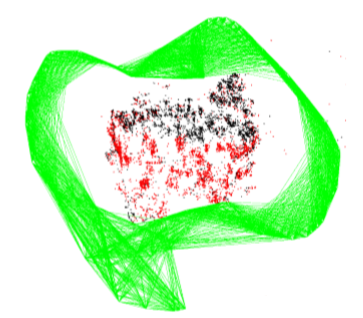
顶点:所有pose;边:pose-pose有共视关系(共视点大于15个)
换言之,将所有共视关系大于15的pose点连接起来,连接的edge的权重就是共视点的个数。图中绿色即为edge,红色为局部地图点,红色+黑色为全局地图点。
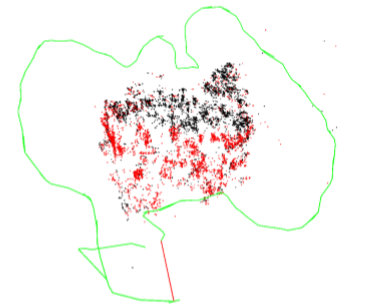
Spanning Tree
图论的概念,无向图能产生不同的生成树(spanning tree),通过边能遍历所有节点。而所有边的权重加起来最小的生成树就是最小生成树。
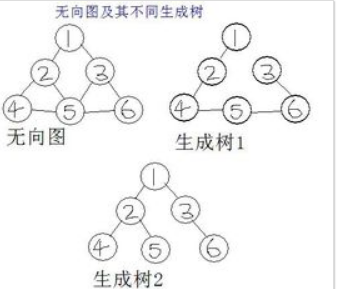
这里的spanning tree是在无向图convisibility graph的基础上,以共视点最多为筛选标准形成的最小生成树。这里面同时还包含了 loop closure edges(红色)
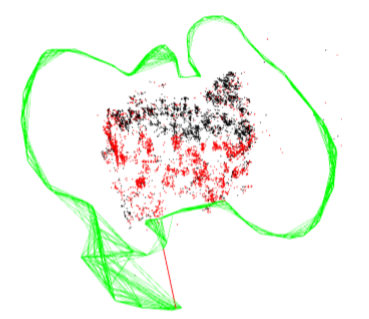
Essential Graph
包含了spanning tree以及convisibility graph中具有极佳共视关系(>100)的边
1.2 总体结构
最后剔除冗余关键帧的条件有两个:
- 90%以上的MapPoints能被至少3个其他关键帧观测到。
- 他们都处在同一尺度下
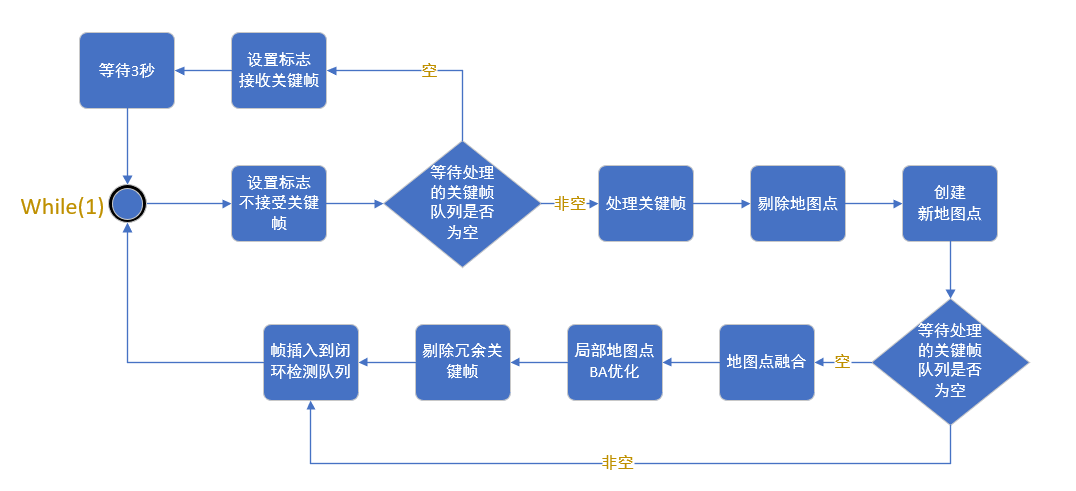
2. 处理关键帧ProcessNewKeyFrame
处理要达成四个目的:
- 计算该关键帧特征点的Bow映射关系
- 处理新匹配上的MapPoints
- 更新关键帧间的连接关系
- 将该关键帧插入到地图中
2.1 处理过程
LocalMapping中有一个成员变量std::list mlNewKeyFrames是等待处理的关键帧列表。在tracking线程中,调用了void LocalMapping::InsertKeyFrame(KeyFrame *pKF)函数,向mlNewKeyFrames链表插入了元素。因此在处理关键帧前,要首先调用bool LocalMapping::CheckNewKeyFrames()检查等待关键帧链表是否为空。
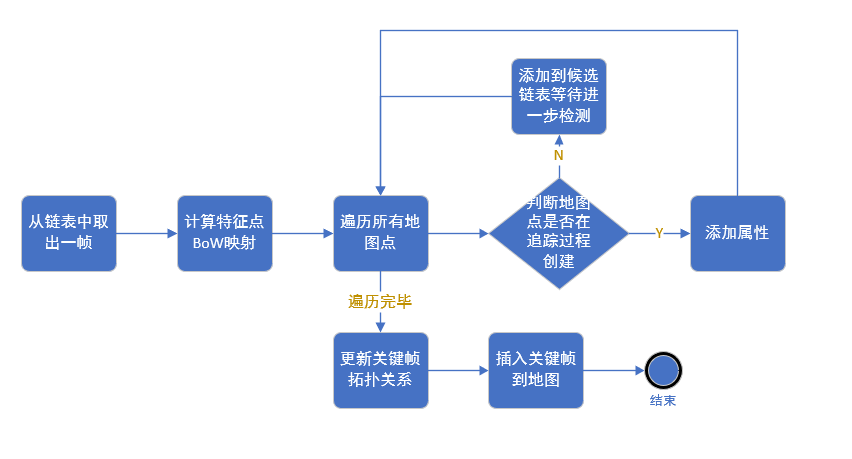
处理时调用void LocalMapping::ProcessNewKeyFrame(),步骤如下:
从链表取出一帧
分三步:锁线程,取元素,删除顶部元素
计算关键帧特征点Bow映射关系
MapPoints和当前关键帧绑定
MapPoints分为两种情况:在tracking过程跟踪到的MapPoints;创建关键帧时创建的MapPoints。前者很可靠,直接为他们添加属性(添加观测者,平均观测方向和观测距离范围,更新最佳描述子),后者不可靠需要放到
mlpRecentAddedMapPoints等待进一步检测。更新关键帧间的连接关系
包括Covisibility图和生成树
插入关键帧到地图
2.2 更新连接关系UpdateConnections
更新的目的是更新Covisibility图和生成树。步骤如下:
统计共视关系
共视关系保存在
map KFcounter中,这个成员key是关键帧,value是权重(权重为其它关键帧与当前关键帧共视3d点的个数),结构如下: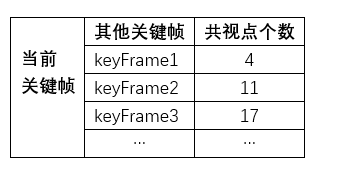
计算的方法借助了
std::map mObservations,它记录了观测到该MapPoint的KF和该MapPoint在KF中的索引,是MapPoint的成员变量。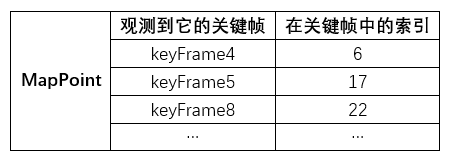
因为MapPoint是属于当前帧的,所以只需要执行
KFcounter[obervation->first]++;就可以统计和当前关键帧共视的其他关键帧,以及共视点个数。记录有良好共视关系的关键帧
搜索
KFcounter中共视点个数大于阈值th(15)的关键帧,将他们放入vector > vPairs容器中(将关键帧的权重写在前面,关键帧写在后面方便后面排序)。同时记录有最多共视点的关键帧,如果没有发现任何大于阈值的帧,就用最多共视点关键帧建立连接。记录完后
sort排序,按共视点个数从大到小。更新图连接
更新与该关键帧连接的关键帧与权重
mConnectedKeyFrameWeights = KFcounter;,将排序的vPairs拆开,容器mvpOrderedConnectedKeyFrames记录排序后的关键帧,容器mvOrderedWeights记录排序后的共视点个数(权重)然后更新生成树,父节点为共视程度最高的那个关键帧
mpParent = mvpOrderedConnectedKeyFrames.front();,并且父节点将本帧添加为子节点(建立双向连接关系)mpParent->AddChild(this);
3. 检查剔除地图点MapPointCulling
对上一函数获取到的最新加入的局部地图点(创建关键帧时创建的MapPoints)mlpRecentAddedMapPoints进行检查,该地图点被创建后的三个关键帧里必须要经过严格的测试,这样保证其能被正确的跟踪和三角化。
删除过程调用SetBadFlag()干两件事情:删除点与帧的观测关系mObservations.clear(),删除帧与点的对应关系
for(map<KeyFrame*,size_t>::iterator mit=obs.begin(), mend=obs.end(); mit!=mend; mit++)
{
KeyFrame* pKF = mit->first;
pKF->EraseMapPointMatch(mit->second);// 告诉可以观测到该MapPoint的KeyFrame,该MapPoint被删了
}
for(map<KeyFrame*,size_t>::iterator mit=obs.begin(), mend=obs.end(); mit!=mend; mit++)
{
KeyFrame* pKF = mit->first;
pKF->EraseMapPointMatch(mit->second);// 告诉可以观测到该MapPoint的KeyFrame,该MapPoint被删了
}
Copy
删除条件如下:
已经是坏点
pMP->isBad()==trueIncreaseFound / IncreaseVisible < 25%
在
SearchLocalMap(TrackLocalMap第二步),通过isInFrustum判断,就调用IncreaseVisible()。在TrackLocalMap中,通过优化,得到了内点和外点,如果点不是外点,说明这个点不仅能被观测,还能和特征点对应上,调用IncreaseFound()。
跟踪到该MapPoint的Frame数相比可观测到该MapPoint的Frame数的比例需大于25%小于观测阈值
从该点建立开始,到现在已经过了不小于2个关键帧,且观测数
pMP->Observations()<=cnThObs,其中cnThObs是针对不同类型相机设置的阈值单目为2,双目为3。
如果这个点已经过了3个关键帧而没有被剔除,则认为是质量高的点,因此没有SetBadFlag(),仅从队列中删除,放弃继续对该MapPoint的检测。
4. 创建地图点CreateNewMapPoints
4.1 创建地图点一般步骤
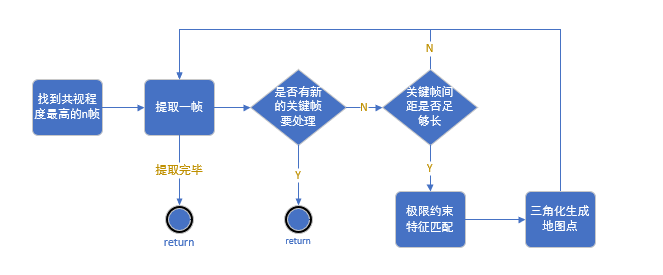
找到共视程度最高的n帧
寻找与当前关键帧拥有最多共视点的n帧,n取值与相机有关,单目要求会高一些。
遍历共视关键帧
如果有新关键帧需要处理就处理新的
判断关键帧间距是否足够长
对于双目而言,间距需要大于双目相机本身的基线;对于单目而言,间距与场景深度中值之比小于0.01
特征匹配
通过极线约束限制匹配时的搜索范围,进行特征点匹配。所谓极线约束就是说同一个点在两幅图像上的映射,已知左图映射点PLPL,那么右图映射点PRPR 一定在相对于PLPL的极线上,这样可以减少待匹配的点数量。最后得到的匹配结果放在
vector > vMatchedIndices;中。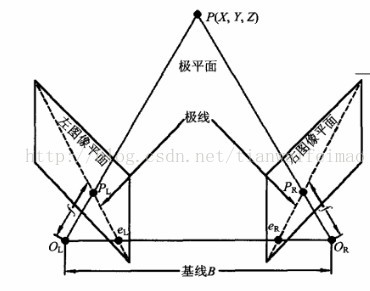
三角化生成地图点
4.2 三角化
一般来说单目相机没有深度信息,需要依靠三角化获得,双目相机能自己获得深度信息。如果点太远,用相机模型获取深度就不是很合适。
如图所示,如果zz的值很大,则视差dd就会变得很小,误差的影响就非常大,所以这时候同样也需要三角化计算深度。
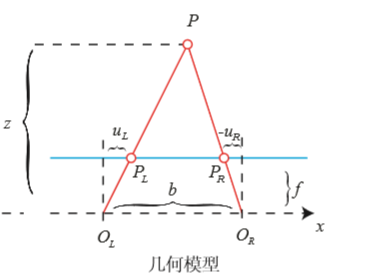
由相似三角形可知:
三角化解法:
假设一个点在三维空间的坐标是$P=[X,Y,Z,1]^T$,其中$p,p’$是匹配好的特征点,他们在不同位姿相机坐标系下:
其中$T$可以表示为:
左边叉乘$p_1,p_2$($z$已被归一化为1):
将两个式子合并(第三个等式没有有效的约束):
四个有效方程,P中含有三个未知数,这是一个超定方程,对矩阵AA奇异值分解SVD求最小二乘解。
具体步骤如下:
提取匹配特征点
从
vMatchedIndices中提取计算视差角
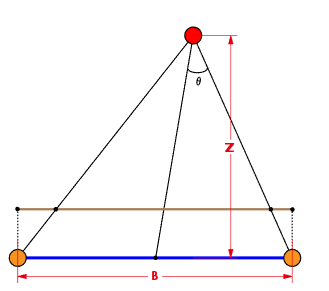
视差角需要计算两个:第一个是当前帧和参考帧的视差夹角,第二个是双目相机左镜头和右镜头的视差夹角。
对于帧与帧的视差角,利用匹配点反投影可以得到方向向量,利用直线夹角计算公式$\theta=\frac{\vec{n_1}\vec{n_2}}{|\vec{n_1}||\vec{n_1}|}$即可算得。对于左右镜头视差角利用近似的几何关系算得。$\theta=\arctan(\frac{1}{2}B/Z)$
计算3D点
单目相机采用三角化的办法,双目相机如果物点距离很远也采用三角化,距离很近直接采用深度(判断距离远近比较两个视差角)
检查3D点
检测生成的3D点是否在相机前方,检测重投影误差是否在可接受范围,检查尺度连续性
将3D点构造成MapPoint
老生常谈了,调用构造函数,然后添加属性
加入检测队列
这些MapPoints都会经过MapPointCulling函数的检验
5. 融合地图点SearchInNeighbors
前面通过新加入的关键帧建立了一些地图点,然而这些地图点和以前建立的可能有重复,所以这一步需要剔除重复。
步骤:
获得最佳共视关系的邻接关键帧
找到当前帧一级相邻与二级相邻关键帧。一级邻接是指和当前帧有最佳共视关系的那些帧,数量根据单双目情况,有所不同。二级关键帧是和一级关键帧有良好共视关系的(程序中是最好的5帧)
正向融合
融合时有两个参数:帧,地图点。若存在重复,则删除;若不重复,添加属性成为正式的地图点,当然也要检查是否具有匹配关系。正向融合的帧是一二级邻接关键帧(遍历),地图点是当前关键帧产生的地图点。
反向融合
反向融合帧是当前关键帧,地图点是所有一二级关键帧对应的地图点(遍历)。
更新
更新当前帧MapPoints的最佳描述子,平均深度,平均观测主方向等属性。同时更新covisibility图,更新当前帧的MapPoints后更新与其它帧的连接关系。