1. 概述
1.1 回环检测的意义
在Slam14讲中提到过,回环检测可以显著减小累计误差的影响,但具体的作用机理并没有讲清楚,这里做一个补充。
由于机器移动过程中,误差会逐步累积导致其计算路径偏离实际路径(误差最明显的是尺度漂移),我们希望能将计算路径修正。
当检测出回环帧,确认路径闭环时,我们可以认为当前帧和回环帧应该是重合的。而实际情况却不相同,这中间差了一个相似变换矩阵S=[sRt01]S=[sRt01],通过计算当前帧和回环帧的信息,我们能求出这个矩阵。再通过位姿传播原理,对之前所有的计算路径进行修正,最终再全局BA得到最优结果。
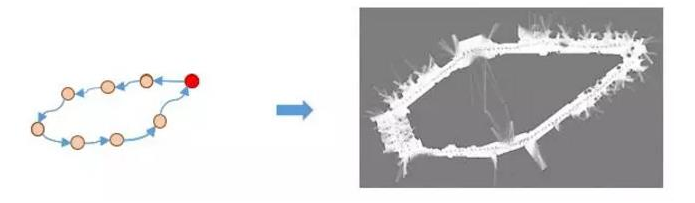
可以看到,如果不进行回环检测,画出的地图非常糟糕:
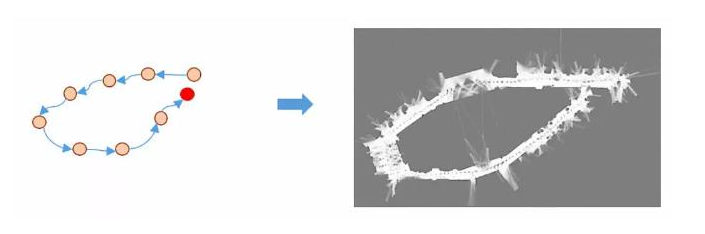
而通过回环检测,能有效提高地图效果:
1.2 总体结构
回环检测的过程就是一个不断筛选择优的过程,总的来说主要的筛选条件有:词袋相似度检测,孤点检测,连续性检测,词袋特征点匹配检测,Sim3匹配检测,重投影匹配检测。
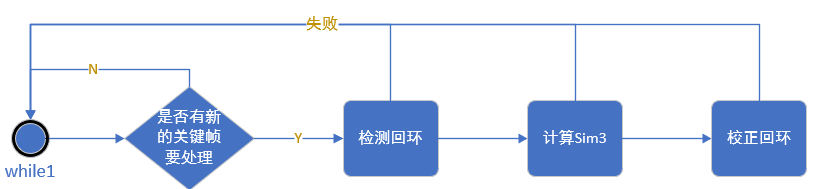
2. 检测回环DetectLoop
这一步我们准确地检测出回环帧,检测的办法就是通过不断的筛选。筛选的过程可以分为两类:单帧对单帧的筛选,多帧对多帧的筛选。
前者是要筛选出和当前帧有可能回环关系的候选帧,包括二者的相似性,候选帧是否孤立等等。后者是一系列帧的比较,主要是检测连续性。
2.1 总体步骤
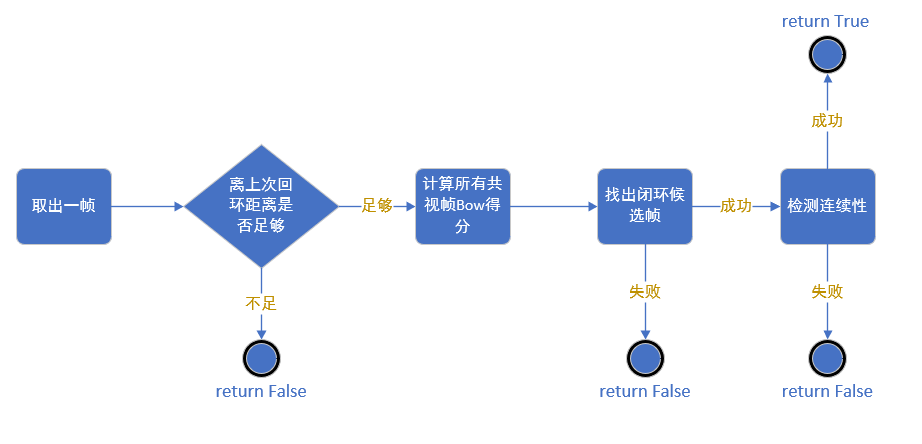
取出一帧
先从
mlpLoopKeyFrameQueue队列中取一帧,这个队列是在LocalMapping的最后插入的关键帧。检测与上一次回环的距离
如果距离上次闭环没多久(小于10帧),或者map中关键帧总共还没有10帧,则不进行闭环检测
计算当前帧与共视帧的Bow得分
这一步需要遍历所有共视关键帧呢,计算他们之间的Bow相似度得分,并得到最低得分
minScore找出闭环备选帧
和当前关键帧具有回环关系的关键帧,不应该低于当前关键帧的相邻关键帧的最低的相似度,且候选帧不应该孤立
连续性检测
实现多帧与多帧的闭环
2.2 找出闭环备选帧
这一步为了在闭环检测中找到与该关键帧可能闭环的关键帧。筛选时有两个阈值:最大共词数,最大组得分。最大共词数用于筛选那些和当前帧长得不像的候选帧,最大组得分用于筛选长得像但孤立的候选帧。
找出和当前帧具有公共单词的所有关键帧
需要排除与当前帧链接的关键帧,把找到的候选帧放入
lKFsSharingWords,同时记录当前帧与候选帧具有相同word的个数mnLoopWords统计候选帧中的最大共词数
在上一步中所有闭环候选帧与当前帧的共次数都存在了
mnLoopWords,遍历然后找到最大共词数。挑选共次数合格的候选帧并计算得分
程序设定的条件是,共词数大于0.8最大共词数。然后调用DBoW2自带的
score函数计算得分。将合格的候选帧和得分组成pair放入lScoreAndMatch计算组得分去除孤立点
单单计算当前帧和某一关键帧的相似性是不够的,这里将与关键帧相连归为一组,计算累计得分。具体做法是:
构建组
利用
pKFi->GetBestCovisibilityKeyFrames(10)得到最佳共视的10帧放入容器vpNeighs中形成一组。计算组得分
遍历组,如果组中的帧满足上面步骤3的条件,则将它的分数累加。
记录最高得分
将所有组中的得分最高组的分数记录下来,作为阈值
组筛选
排除分数低于0.75倍最高分数的组。将筛选后的候选帧插入
vpLoopCandidates
2.3 连续性检测
需要实现多帧与多帧闭环,所以要做连续性检测。
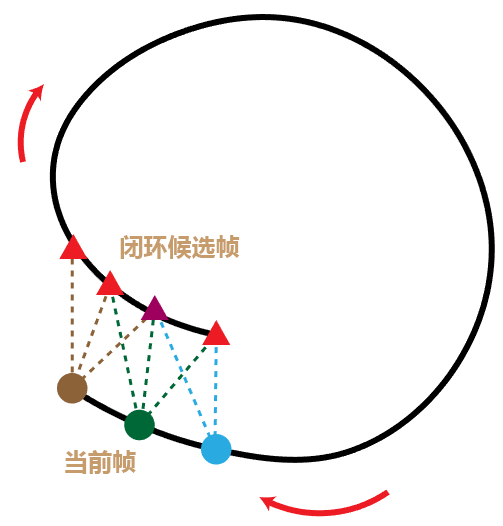
如图所示,在闭环候选帧中,紫色那一帧连续被三个当前帧匹配到,所以它通过了合格性检测,可以被作为良好的候选帧。这种检测方法是将一系列当前帧和一系列闭环候选帧比较,所以是多帧对多帧闭环。
这里的”匹配”非常特殊,因为闭环候选帧不是连续的,他们的拓扑结构是这样:
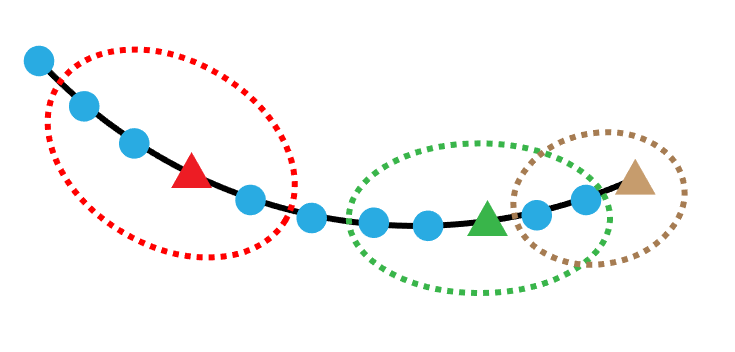
彩色三角代表候选帧,蓝色圆形则为普通帧。我们将候选帧和与他有良好共视关系的普通帧圈起来,组成子候选组,后面比较连续性就是以组为单位比较。
检测时,当前帧如果和某一子候选组发生关系(和组员有良好共视关系),那么这一子候选组连续性+1,并传递到下一个当前帧。如果当前帧没有和某子候选组发生关系,则此候选组连续性直接清零。如果能连续通过3次考验,则就算通过连续性检测。
3. Sim3计算ComputeSim3
该函数计算相似变换,从mvpEnoughConsistentCandidates中找出真正的闭环帧mpMatchedKF。
这个部分要达成两个目的:第一,准确计算Sim变换矩阵,为后面的校正做铺垫;第二,进一步筛选闭环帧。
筛选分为三个阶段:阶段一利用词袋匹配的办法剔除,阶段二利用Sim3匹配剔除,阶段三利用重投影匹配剔除。
Step1 一次筛选
从闭环候选帧容器中取出一帧
之前通过连续性检测的结果都放在
mvpEnoughConsistentCandidates,从这里面取出一帧。当前帧与候选帧匹配
通过bow加速得到mpCurrentKF与pKF之间的匹配特征点,调用函数
SearchByBoW,如果匹配的特征点少于20个,vbDiscarded[i]打上标记。构造Sim3求解器
Ransac参数:迭代300次,至少20个内点才能通过。结束后重复执行1。
Step2 二次筛选
从候选帧容器取出一帧
如果
vbDiscarded有标记,则放弃此帧,再取一帧。求解Sim3
Step1.3构造的求解器存储在
vpSim3Solvers[i]中,取出来,求解,迭代5次。如果得不到好的结果,打上discard标记。Sim3弥补漏匹配
在Step1.2中进行了一次匹配,但由于尺度误差,很多特征点没有进行有效匹配,现在成功计算出了相似变换矩阵,用它进行弥补。调用函数
SearchBySim3Sim3优化
引入弥补后的匹配点,调用
OptimizeSim3进行优化。如果优化得到的内点数大于20,则表示通过考验,此帧就是闭环帧。然后立马break。结束后重复执行1。清理垃圾
如果把候选帧容器都遍历完了,依然没有任何一帧被确立为回环帧,则说明当前帧没有发生回环。清除
mvpEnoughConsistentCandidates
Step3 三次筛选
提取闭环帧的相连关键帧
把相连关键帧的所有MapPoint放入
mvpLoopMapPoints投影到当前帧匹配
调用
SearchByProjection,统计匹配成功的点数清理候选帧容器
如果匹配成功的点数
nTotalMatches大于40,说明完成了最后的考验,返回true,清空容器mvpEnoughConsistentCandidates;若小于40,则表示闭环失败,清空容器,返回false。
4. 回环校正CorrectLoop
通过前面的操作我们得到了最终的回环帧和Sim变换矩阵,现在要利用这些条件,进行全局校正。
校正之前需要先停止LocalMapping线程,停止全局BA。
4.1 主要步骤
更新连接
回环检测和Sim3计算需要消耗一定时间,这时候机器人依然在移动,依然有关键帧传输进来,因此在这一步需要重新更新一下帧与帧之间的共视关系。
Sim3优化位姿和地图点
主要是通过位姿传播原理,通过相对位姿关系,可以确定这些相连的关键帧与世界坐标系之间的Sim3变换。这一 步开始遍历相连关键帧
检查地图点冲突
检查当前帧与闭环帧的MapPoints是否存在冲突,对冲突的MapPoints进行替换或填补。有的时候可能会产生一个特征点对应两个地图点的情况,需要用Step3匹配的结果替换当前帧的结果。和下面不同的是:这里并没有做投影匹配,只是调用
replace函数将重复的地图点踢掉了。地图点融合
这一步跟上一步有点像,不同的是融合的对象是闭环时所有相连关键帧对应的地图点
mvpLoopMapPoints。此处调用了Fuse函数,它通过投影作用,将mvpLoopMapPoints投影到校正后的当前帧,在阈值为4的范围内搜索。如果MapPoint能匹配关键帧的特征点,并且该点有对应的MapPoint,那么将两个MapPoint合并(选择观测数多的)。如果如果MapPoint能匹配关键帧的特征点,并且该点没有对应的MapPoint,那么为该点添加MapPoint。更新连接
与第一步不同的是,这一步更新是因为闭环校正,第一步是因为新插入了关键帧。调用
UpdateConnections后得到了新的连接关系,然后删除之前存在的一级连接关系和二级连接关系(防止冲突)优化
EssentialGraph优化
对形成闭环后新生成的重要的关键帧的Sim3位姿进行优化。回环边不参与优化。调用
OptimizeEssentialGraph优化,采用g2o方案全局BA优化
上一步没有优化回环边,这里添加进去。新建了一个线程执行全局BA。
4.2 Sim3传播优化
针对第二步Sim3优化位姿和地图点进行详细分析。
传播计算Sim3
位姿传播公式PoselPosec=SimlSimcPoselPosec=SimlSimc,我们只需要得到回环帧的位姿,当前帧的位姿,回环帧的Sim矩阵,就可以求出当前帧的Sim矩阵,把计算后的结果放在
CorrectedSim3(这里只算出来,还没有校正)修正MapPoint
利用Sim修正的结果计算地图点
校正关键帧位姿
将Sim3转换为SE3才能更新位姿
更新连接