1. 鱼眼镜头原理
常见的相机模型是小孔模型,但小孔模型的视场比较小,即使采用超广角镜头视场也大概只有150°,很难做到全覆盖。因此人们利用鱼眼的特性发明了鱼眼镜头,能够达到接近180°的视场。
如图所示,小孔模型对于180°视场,只能将一部分投影到平面上,剩余的一小部分被截去了。
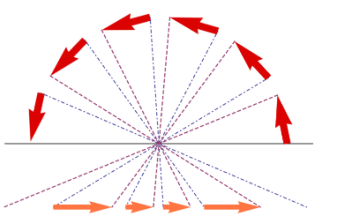
在自然界中,鱼眼能够通过水的折射,将光线压缩到一个锥形内
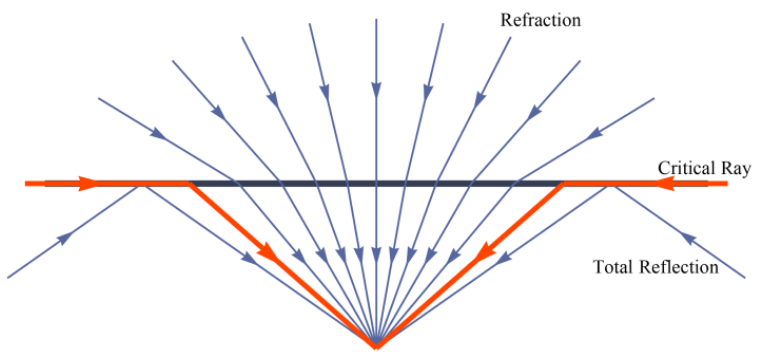
在这个锥形内部有一部分来自水面上方,有一部分来自水面下方,水面上方的所有景物都被压缩到了一个圈内,这就是斯涅耳窗口

如果这样拍一张照片,就可以在一个合理的照片大小范围内,记录整个水面上的半球空间内的景象。有效的视角范围接近 180°,远远超过普通超广角镜头记录的范围。鱼眼镜头与这个场景类似,也是把很大角度范围内的光线进行「压缩」和「扭曲」,压进一个相对较小的空间内,从而可以被相机所记录下来。
2. 鱼眼镜头模型
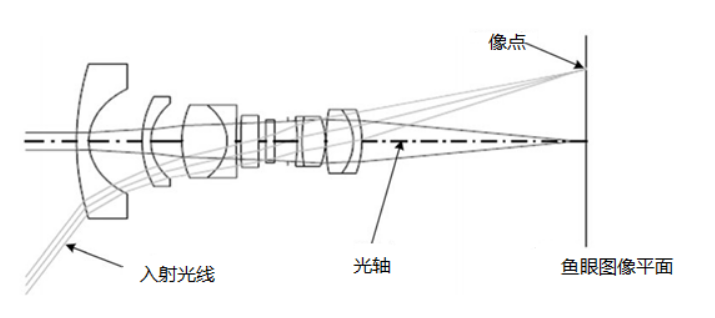
鱼眼镜头由一系列复杂的透镜组成,前两个透镜负责大力折射光线,后面的镜头负责成像。
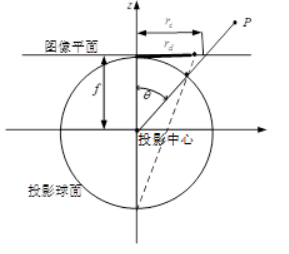
鱼眼相机成像时遵循的模型可以近似为单位球面投影模型。可以将鱼眼相机的成像过程分解成两步:
- 三维空间点线性地投影到一个球面上,它是一个虚拟的单位球面,它的球心与相机坐标系的原点重合
- 单位球面上的点投影到图像平面上,这个过程是非线性的

从球面投影到CCD平面的模型有很多种
- 等距投影 $r_d = f \theta$
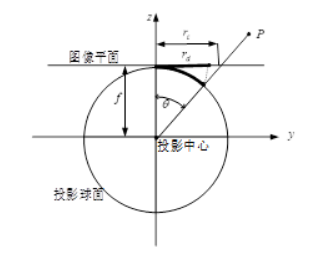
- 等立体角投影 $r_d = 2fsin(\frac{\theta}{2})$
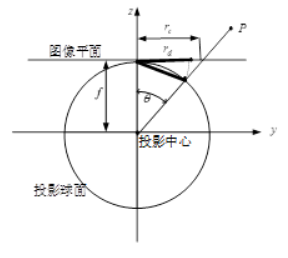
- 正交投影 $r_d = fsin( \theta)$

- 体视投影 $r_d = 2ftan(\frac{\theta}{2})$
3. Opencv中的鱼眼相机模型
由于投影方式多种多样,我们可以对其采用近似方法将其统一。观察可以发现,$\sin,\tan$的泰勒展开都是奇次项形式,取前5项可得即:
从空间点到鱼眼图像上的点的变换过程可用式子表示为: