光流法是计算机视觉中非常重要的方法,本文介绍了光流法的基本原理和提高精度的进阶办法。
1. 光流法基本原理
光流是一种描述像素随时间在图像之间运动的方法,随着时间的流逝,同一个像素会在图像中运动,我们可以追踪他的运动。
光流法应用的前提是灰度不变假设,也就是说$I(x_1,y_1,t_1)=I(x_2,y_2,t_2)$,虽然这是一个很苛刻的假设,但我们还是需要认为其在某些场景下具有合理性。
假设在$t+dt$的时刻某个像素运动到了$(x+dx,y+dy)$,我们可以得到:
如果对上式中右侧进行一阶泰勒展开:
根据灰度不变假设可以得到:
两侧同时除以$dt$,可以得到:
其中 $\frac{dx}{dt},\frac{dy}{dt}$ 为像素在$x,y$轴上的运动速度,将他们记为 $u,v$。同时 $\frac{\partial I }{\partial x},\frac{\partial I}{\partial y}$ 记为图像在$x,y$方向上的梯度,分别记为$I_x,I_y$,把图像灰度对于时间的变化量记为 $I_t$,上面的式子可以表示为:
我们假设某个$W\times W$的窗口内的像素具有相同的运动,则:
简化后可得:
这是一个超定方程(方程个数大于未知数个数),可以使用最小二乘法求解:
超定方程组是指方程个数大于未知量个数的方程组,在方程$Ax=b$两边乘以$A^T$,所以该方程有唯一解且为原方程的最小二乘解:
总结一下,光流法基于三个假设:
- 灰度不变,所以$I(x+dx,y+dy,t+dt) =I(x,y,t)$
- 小运动,所以我们可以取一阶泰勒展开
- 邻域内光流不变,所以我们可以取$W\times W$的小窗口
2. 金字塔光流法
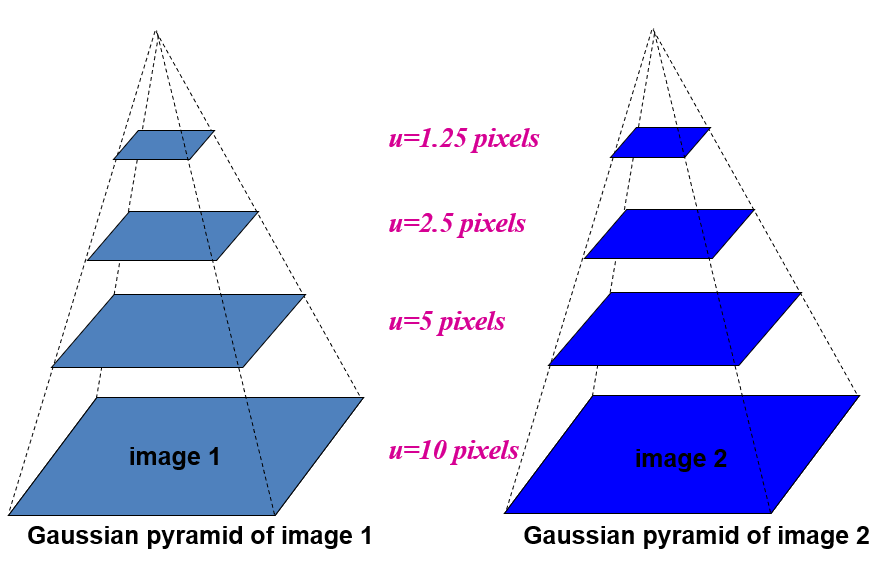
光流法重要前提是小运动,也就是说图像随时间变化缓慢,这样灰度才能求偏导,最理想的条件当然是相邻帧图片间隔1个像素。为了解决运动过快导致的误差较大问题,我们可以通过减少图像中物体的位移。
缩小图像尺寸能有效减少位移,比如图像为400×400时,物体单位时间位移为[16,16],那么当图像缩小为200×200时,位移变为[8,8]。缩小尺寸的办法可以使用金字塔分层。
高斯金字塔的概念在SIFT特征检测中已经详细说明。通过高斯金字塔能形成组(Octave)和层(Level或Interval)。
下面开始公式推导,假设$I,J$是两幅相邻运动图像。图像$I$的点$(x,y)$对应了图像$J$的点$(x+dx,y+dy)$,也就是说:
当然这之间肯定会存在误差,写出一片领域下的误差函数:
假设图像的尺寸每次缩放为原来的一半,共缩放了$Lm$组,第0组误差为$e(d)$,则每组的光流计算结果为为:
这并不是准确的结果,还得加上残差:
反馈到第$L-1$层:
对于每一层,我们都希望光流的计算基于邻域内所有点匹配误差和最小化:
具体算法是:
- 利用最小二乘法计算最顶层的最小光流
- 更新光流$v=2*v$,将光流方向传递到下一层,计算最小光流
- 持续传递,直到传递到原图像输出