Harris是一种简单但实用的角点检测手段,本文介绍了他的基本原理,以及优劣势。
1. 基本原理
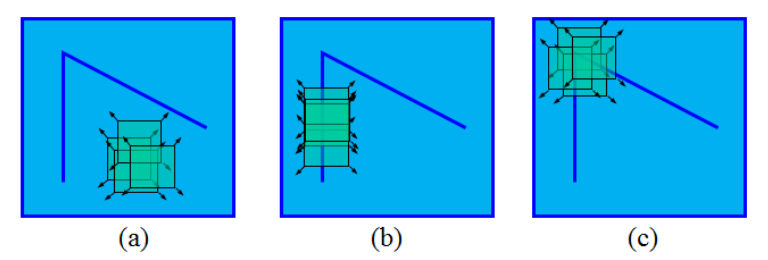
当一个窗口在图像上移动,在平滑区域如图(a),窗口在各个方向上没有变化。在边缘上如图(b),窗口在边缘的方向上没有变化。在角点处如图(c),窗口在各个方向上具有变化。
假设图像窗口平移$[u,v]$产生的变化为$E(u,v)$则:
泰勒展开可得:
这是单个像素的表达式,当发生微小位移时,忽略无穷小量。现在,我们考虑一个领域窗口内所有像素的移动情况,写成矩阵形式:
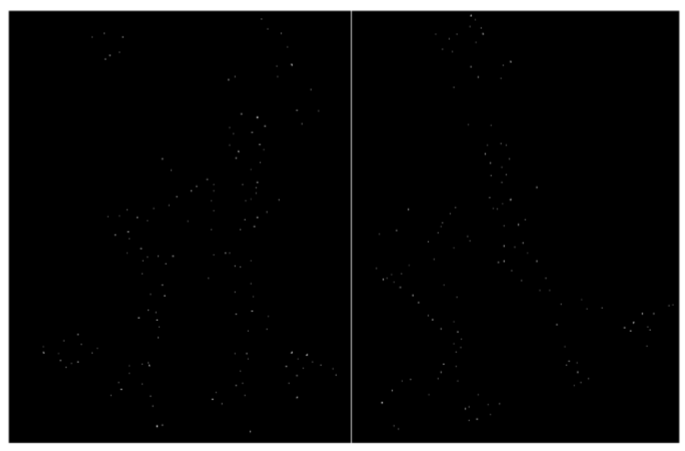
假设梯度坐标表示为$(I_X,I_Y)$,,这个和上面有区别。不同的纹理特征表现出来的梯度坐标分布不同:
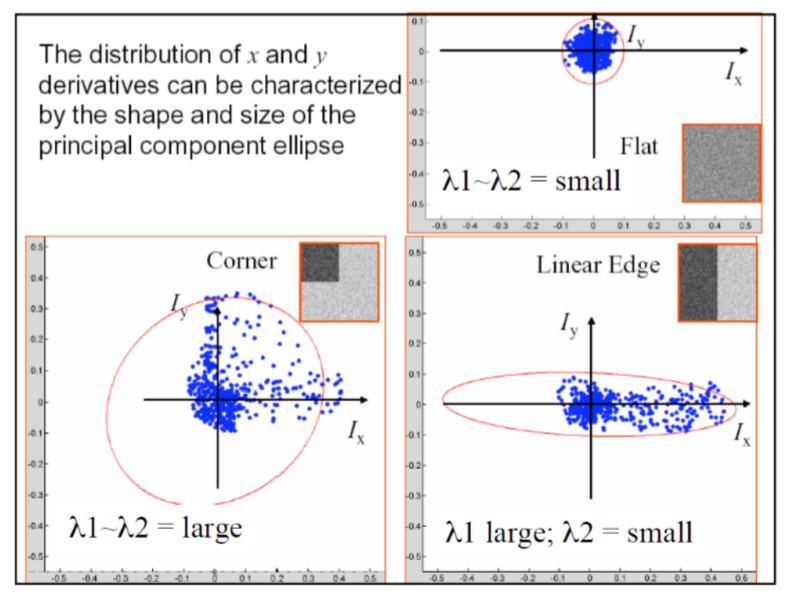
注意:样例图片并不是纯色,里面包含了很多的椒盐点,所以梯度分布才会出现散状。
可以看出,均匀图像的灰度在 $x,y$ 方向几乎没有变化,类似一个圆;边缘图像在某一个轴方向变化剧烈,在另一个方向没有变化,近似为一个扁椭圆;角点在两个方向变化都很剧烈,近似为一个卵型。
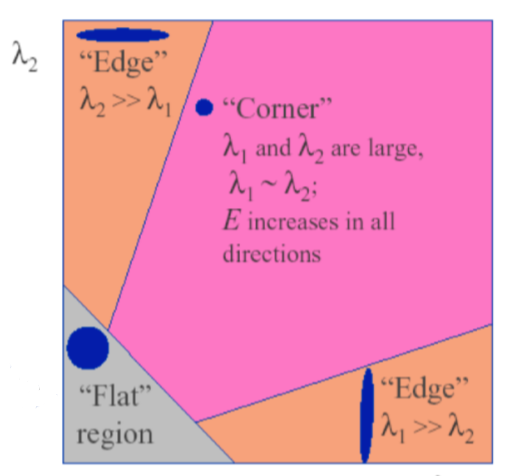
因此判断角点的条件就变为:长轴短轴都超过某一阈值,转化为矩阵语言就是$M$有两个大特征值。
2. 计算方法
由上可知,我们判断角点的依据就是特征值的大小
常规思路是进行SVD分解:
但速度比较慢,难以做到视频中实时监测的需求(30帧每秒),所以我们可以采用近似的做法:
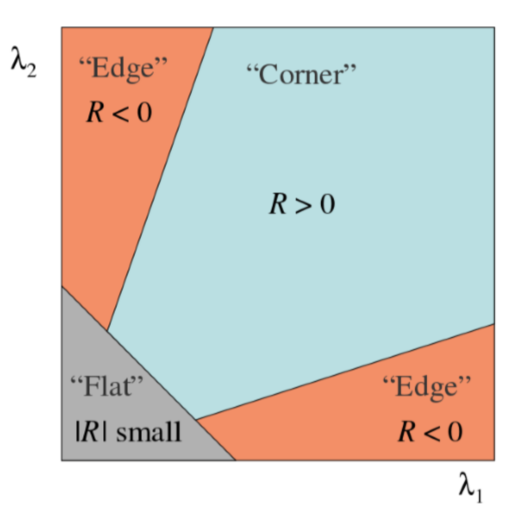
采用近似的形式,$\alpha$一般取0.04-0.06:
此时判断条件变为:
3. 性质
一般来说计算的角点会呈块状分布

所以我们需要使用非极大抑制(Non-maxima suppression)处理,得到单个的角点:
Harris角点对亮度和对比度的变化并不敏感
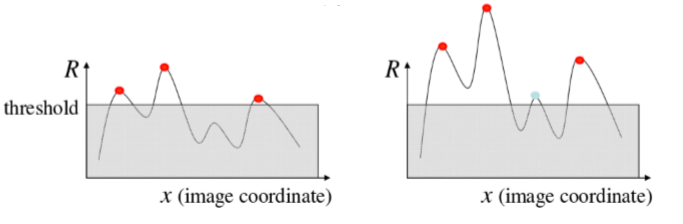
对于亮度来说,整体的上升和下降,并不影响角点的检测。对于对比度来说,按比例拉伸曲线,并不改变Harris响应的极值点出现的位置,但是,由于阈值的选择,可能会影响角点检测的数量。
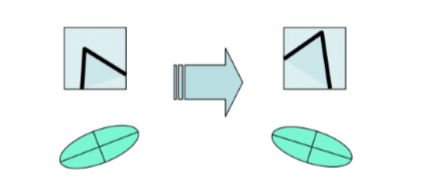
Harris角点检测算子具有旋转不变性。Harris角点检测算子使用的是角点附近的区域灰度二阶矩矩阵。而二阶矩矩阵可以表示成一个椭圆,椭圆的长短轴正是二阶矩矩阵特征值平方根的倒数。当特征椭圆转动时,特征值并不发生变化,所以判断角点响应值也不发生变化,由此说明Harris角点检测算子具有旋转不变性。
Harris角点不具有尺度不变性。当图被缩小时,在检测窗口尺寸不变的前提下,在窗口内所包含图像的内容是完全不同的。左侧的图像可能被检测为边缘或曲线,而右侧的图像则可能被检测为一个角点。
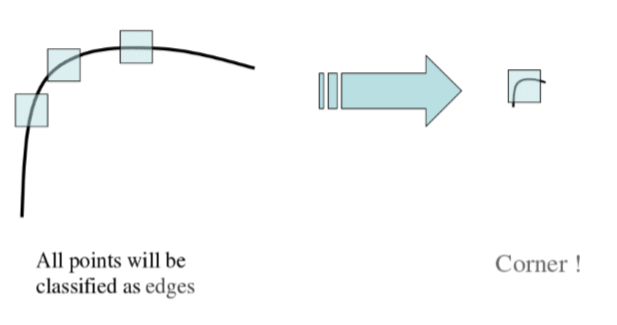
随着尺度的减小,能检测到角点数量也相应降低。